


 三甲
三甲
荐读|自主机器人腹腔镜手术
多年以来医学界,在发达国家,外科一直在稳步推进机器人辅助手术的技术,它可使医生能够在手术过程中表现更从容和更稳定。而今,新的技术又出现了,美国有关研究专家表示,机器人已经成功地独立自主对目标进行了腹腔镜手术——无需人类的指导或帮助操作,他们将这种技术称为Autonomous robotic laparoscopic surgery(自主机器人腹腔镜手术)。
这种机器人的自主动作要比人类专业医生产生了“明显更好”的结果。
这一突破性技术是朝着可以对患者进行全自动手术的那一天,又迈出了坚实的一步。
智能自主机器人(Star)进行腹腔镜手术,将分别在四头猪身上的肠道两端进行了缝合,完成了端-端吻合保质保量地连接起来。根据发表在《科学》系列杂志(机器人)子刊上的一篇论文:Autonomous robotic laparoscopic surgery for intestinal anastomosis该机器人擅长该程序,该程序需要高精度和重复性动作。
美国约翰霍普金斯大学的 Axel Krieger 表示,这标志着机器人首次在没有人类操作帮助的情况下进行腹腔镜手术。
?Axel Krieger说“研究结果表明,目前的手术机器可以完成自动化的最复杂和微妙的任务之一:缝合肠道的两端吻合。Star 机器人在四只动物身上进行了手术,它完成的过程和产生的结果明显优于人类进行相同手术的结果。”
完成缝合肠道的两端吻合技能在胃肠外科手术中是一项具有挑战性的过程,需要外科医生以高精度和一致性进行缝合。即使是轻微的不准确或错位的缝线也可能导致严重可怕的消化道泄漏,从而导致患者遭受致命的并发症。
约翰霍普金斯大学机械工程助理教授克里格帮助创建了目前的机器人,这是一种专门用于缝合软组织的视觉引导系统。它改进了 2016 年修复猪肠道的模型,但这种技术需要大切口才能进入腹腔对肠道进行操作,并需要更多人类指导。
专家表示,新功能可以提高手术精度,包括专门的缝合工具和成像系统,可提供更准确的手术区域可视化。
以往的机器人很难进行软组织手术,因为它是不可预测的,迫使它们能够快速适应以应对意想不到的障碍。该论文在机器人 Star 中提出了一种新颖的控制系统,可以像人类外科医生一样实时调整手术计划。克里格说:
“机器人Star 的特别之处在于,它是第一个在软组织中计划、调整和执行手术计划且人工干预最少的机器人系统。机器人的肠吻合术(通过手术缝合将两个管腔结构连接起来)是确保需要的手术任务的一种方法高精度和可重复性可以在每位患者身上以更高的准确性和精确度执行,这一操作使得与外科医生的技能无关。作者假设若将这一符合标准的手术操作方法,具有更可预测和一致的治疗结果。
研究人员表示,STAR分别在四只动物上进行了手术,手术效果明显好于人类操作的同一手术。STAR在肠道吻合手术方面表现出色,这种手术需要高度的重复运动和精确把控。连接肠子的两端可以说是胃肠道手术中最具挑战性的步骤,需要外科医生以高度的准确性进行缝合。即使是最轻微的手部颤抖或缝合错位,都可能导致病人产生灾难性的并发症。
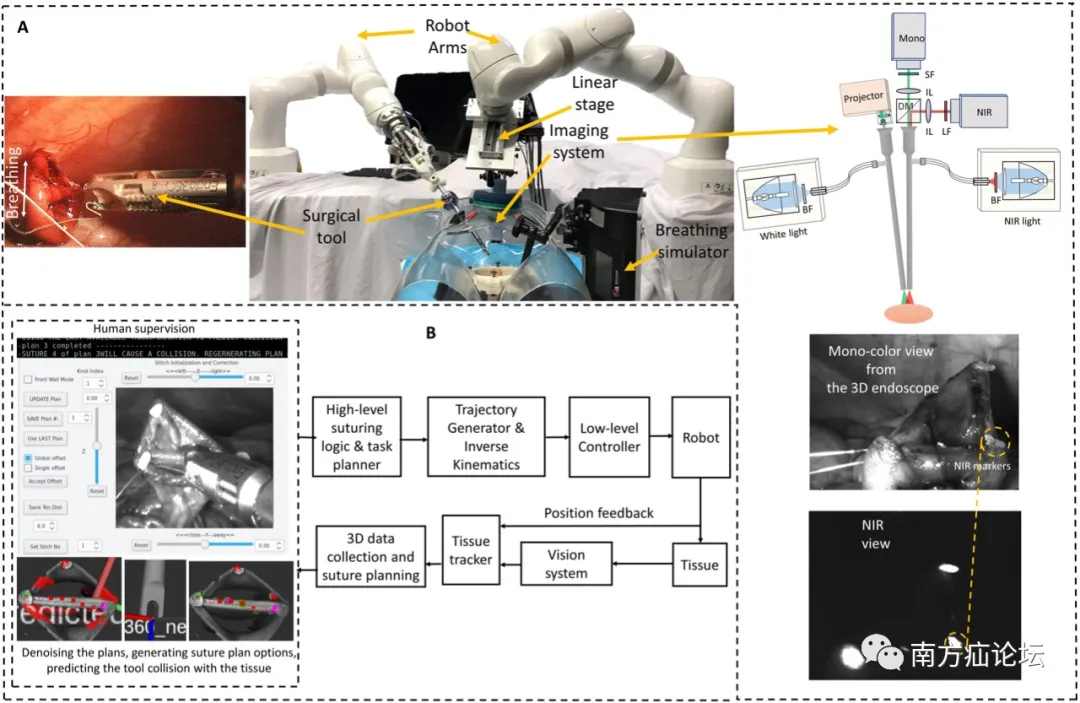
为此,研究团队为STAR配备了新功能,以增强它的自主性和提高手术精度,包括专门的缝合工具和最先进的成像系统。
STAR的特别之处在于,它是第一个在软组织中实现操作的自适应和执行手术计划的机器人系统,人为干预很小。而且,研究团队开发的基于结构光的三维内窥镜和基于机器学习的跟踪算法指导着STAR。
研究团队相信,先进的三维机器视觉系统至关重要。随着医疗领域向更多的腹腔镜手术方式发展,自动化机器人系统的协助将非常重要。
使用机器人操作肠道吻合手术,是确保需要高精度和可重复性的手术任务能够在每个病人身上以更高的精度和准确性进行,而不受外科医生技能的影响。
from “Sci Robot“.2022 Jan 26;7(62):eabj2908.
Autonomous robotic laparoscopic surgery for intestinal anastomosis
H Saeidi?1?2,?J D Opfermann?2?3,?M Kam?2?3,?S Wei?3?4,?S Leonard?3,?M H Hsieh?5,?J U Kang?3?4,?A Krieger?2?3
Affiliations?expand
- PMID:?35080901
- AbstractAutonomous robotic surgery has the potential to provide efficacy, safety, and consistency independent of individual surgeon‘s skill and experience. Autonomous anastomosis is a challenging soft-tissue surgery task because it requires intricate imaging, tissue tracking, and surgical planning techniques, as well as a precise execution via highly adaptable control strategies often in unstructured and deformable environments. In the laparoscopic setting, such surgeries are even more challenging because of the need for high maneuverability and repeatability under motion and vision constraints. Here we describe an enhanced autonomous strategy for laparoscopic soft tissue surgery and demonstrate robotic laparoscopic small bowel anastomosis in phantom and in vivo intestinal tissues. This enhanced autonomous strategy allows the operator to select among autonomously generated surgical plans and the robot executes a wide range of tasks independently. We then use our enhanced autonomous strategy to perform in vivo autonomous robotic laparoscopic surgery for intestinal anastomosis on porcine models over a 1-week survival period. We compared the anastomosis quality criteria-including needle placement corrections, suture spacing, suture bite size, completion time, lumen patency, and leak pressure-of the developed autonomous system, manual laparoscopic surgery, and robot-assisted surgery (RAS). Data from a phantom model indicate that our system outperforms expert surgeons‘ manual technique and RAS technique in terms of consistency and accuracy. This was also replicated in the in vivo model. These results demonstrate that surgical robots exhibiting high levels of autonomy have the potential to improve consistency, patient outcomes, and access to a standard surgical technique.
如果读完此文,小编产生以下的想法和问题:
1)以后外科医生会不会失业,外科这外行业会不会消亡?如果说你目前不会,但你儿子或孙子呢?
2)从手术操作角度讲肠吻合难度是否比腹股疝的疝囊分离难?
3)从AI角度讲,以前陈双教授讲的“疝囊的几何法”对以后的机器人算法会不会有帮助?
4)从技术和费用上讲,谁应该为技术买单。是病人,还是医生?
本文是江志鹏版权所有,未经授权请勿转载。本文仅供健康科普使用,不能做为诊断、治疗的依据,请谨慎参阅
评论